
配膳ロボットをFAで使う場合の注意点① ~環境編~

1. 配膳ロボットの使用場所
配膳ロボットの製造現場への導入には、まず環境が適しているかの確認が必要です。当社取り扱いの配膳ロボットは、屋内使用に限定され、飲食店やホテルなどでの使用を想定しています。
- 屋内使用の限定: 屋外使用はできず、屋内のみで使用可能です。
- 液体の影響: 水などの液体がボディにかかると、隙間から侵入し損傷の原因となります。
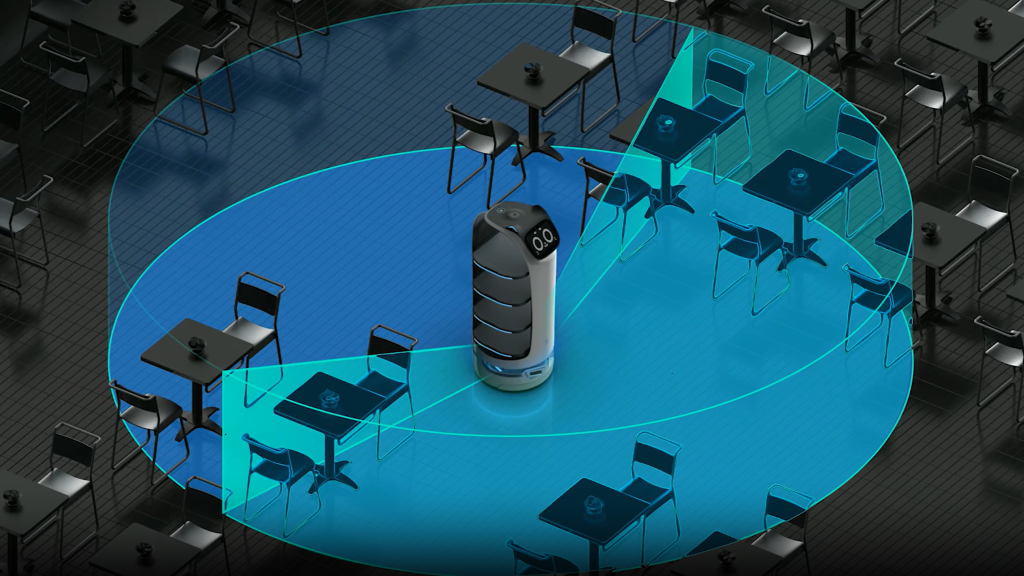
- 光の影響: ロボットはレーザーやRGBDカメラを使って位置補正を行います。直射日光が当たる場所では自己位置を見失う可能性があるため、事前に走行テストを行うことが必要です。
- ガラス張りの場所: 一面ガラス張りで障害物がない場所ではレーザーが反射せず、自己位置を見失います。床面から20cm~30cmの高さにテープを貼ることで、レーザーが反射し走行可能になります。

2. 床面の状態
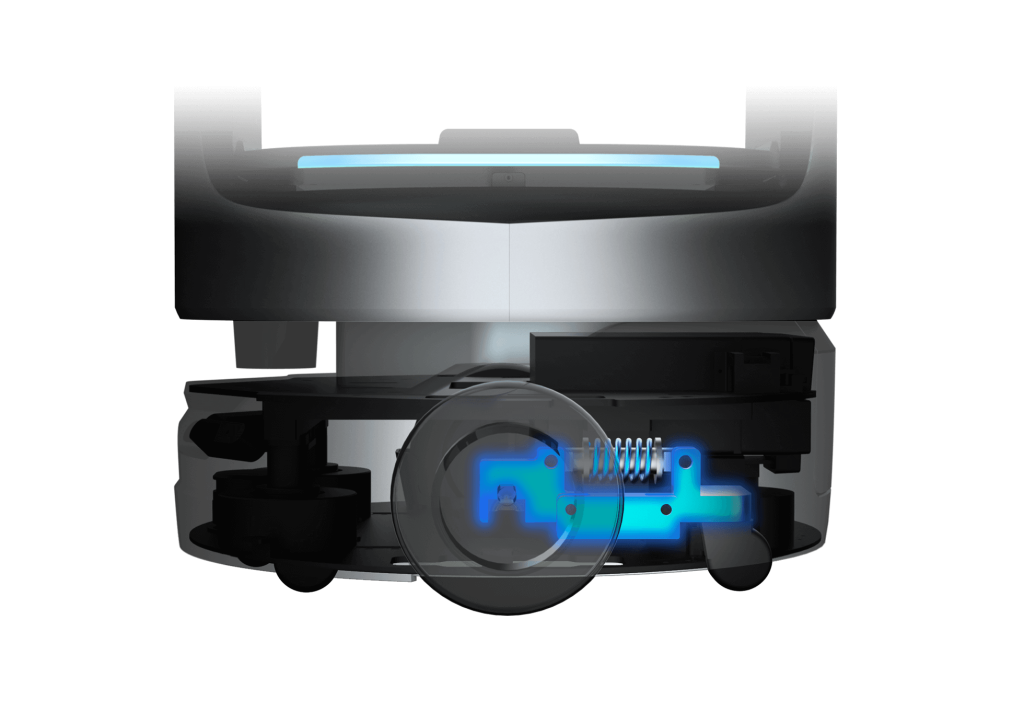
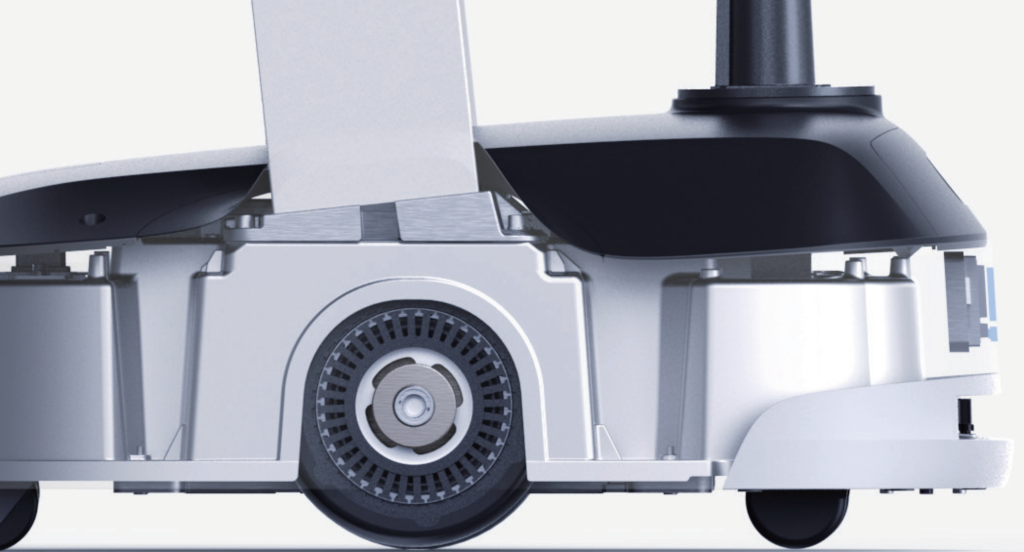
配膳ロボットは駆動輪の回転数を計測し、移動距離や自己推定位置を算出します。そのため、床面の状態は非常に重要です。
- 乾燥した床: なるべく床は乾燥していることが望ましいです。
- 滑りやすい物質の除去: 床に切削油などの滑りやすいものがあると、駆動輪が空転し自己推定位置が分からなくなります。また、ロボットが停止しようとしたときに滑ると事故の原因になります。
3. 段差や傾斜
配膳ロボットの段差や傾斜の影響については、以下の点に注意が必要です。
- 段差: ロボットのスペックとして段差は5mmまで走行可能です。5mm以上の段差は、駆動輪が浮いて空転し、自己推定位置が狂う原因になります。
- 傾斜: 傾斜は5度まで走行可能です。上り傾斜にさしかかる際に、安全センサが傾斜を障害物と認識して停止する恐れがあります。段差は5mm以下、傾斜は5度以下が望ましいです。
4. 配膳ロボットを実際に製造現場で使っている様子
実際の製造現場での配膳ロボットの使用例を紹介します。以下のポイントに注意しながら使用されています。動画でもご確認ください!
- 環境適応: 直射日光やガラスの反射がないか確認。
- 床面の整備: 床が乾燥し、滑りやすい物質がない状態を維持。
- 段差と傾斜の管理: 事前に走行テストを実施し、段差や傾斜を確認。
5. まとめ
配膳ロボットの製造現場への導入には、以下の項目の確認が必要です。
- 使用場所: 直射日光の有無や障害物の有無、ガラス張りではないこと。
- 床面の状態: 水が溜まっていないこと、切削油などで滑りやすくないこと。
- 段差や傾斜: 段差は5mm以下、傾斜は5度以下。
当社では配膳ロボットの無償トライアルを実施しております。導入を検討しているが、環境が適しているか不安な方は、ぜひ当社にご相談ください。
OTHER COLUMN
その他の技術情報・コラム
企業におけるヒューマノイド活用の最前線──導入事例と今後の可能性
近年、「ヒューマノイド」の技術的な進化が目覚ましく、かつては研究機関や展示会でしか見かけなかった存在でしたが、現在では実際のビジネス現場でも導入され始めています。ヒューマノイドを企業に導入する動きは加速度的に広がっており […]

配膳ロボットの使い方ガイド!実践的な活用方法も解説
近年、飲食業界や製造業界で広く活用されてきた配膳ロボットは、その機能性と効率性から製造業への応用も注目されています。この記事では、配膳ロボットの使い方を設定から実際の動作方法まで詳しく解説します。 >>配膳ロボットの概要 […]
ウエハ搬送・配膳の自動化で生産効率を劇的改善!AGVとAMRの導入ポイントを徹底解説
半導体製造工場では、ウエハの搬送や配膳の自動化が生産効率を大きく左右します。特に、精密な操作が求められるウエハの取り扱いでは、人手に頼ると誤差や破損のリスクが高まります。そこで注目されるのが、AGVやAMRといった自動搬 […]